NovAtel delivers OEM driver built on Robot Operating System
Hexagon | NovAtel has announced released its first purpose-built driver, powered by Robot Operating System (ROS), to support its OEM7 family of GNSS receivers.
The driver, developed by NovAtel engineers, provides an optimized interface enabling users to accelerate autonomous development projects by quickly incorporating NovAtel OEM7 receivers into custom applications.
The driver is available for immediate download through the new NovAtel GitHub repository or as a ROS Binary Package for direct installation.
With the release of a NovAtel-developed OEM7 driver built on ROS, developers can now confidently access the critical data needed to build autonomy algorithms for academic investigations, ride-share programs, and other applications.
Data from numerous sensors can be combined to help move projects into higher levels of autonomy faster without the need to adapt community-developed drivers. Tested using the Hexagon | AutonomouStuff platform, the driver ensures that the data received accurately reflects the output provided by the receiver, while also giving users the ability to record raw data for post-processing.
“We are excited to introduce our first purpose-built driver powered by ROS to the GitHub community. Its development is a result of collaboration between NovAtel and AutonomouStuff in support of Hexagon’s Smart Autonomous Mobility (SAM) initiative, unveiled at CES 2020 in Las Vegas,” said Miguel Amor, chief marketing officer, Hexagon’s Autonomy & Positioning division. “The SAM portfolio is a comprehensive solutions platform that brings together all the necessary sensors, software and services to make autonomous driving possible.”
The new driver is available for download on the NovAtel GitHub repository.
ROS is a trademark of Open Robotics.
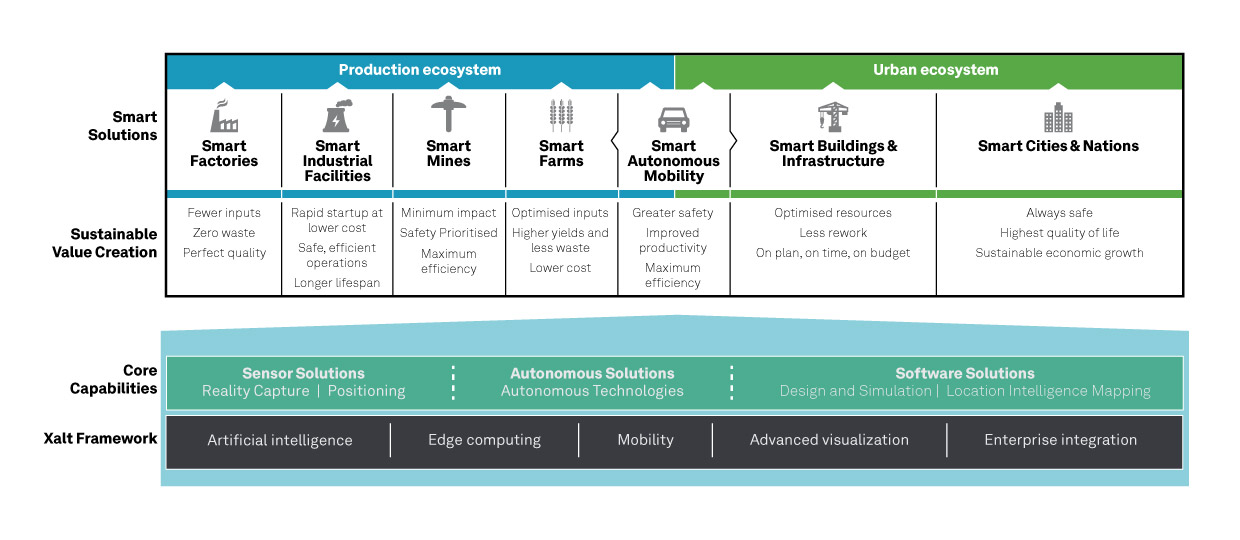
Hexagon’s Smart Solutions portfolio. (Image: Hexagon)