Inertial Labs explains lidar, GPS-aided INS and data management
A new blog offered by Inertial Labs discusses the scope of work to turn lidar point-cloud data collection into actionable deliverables. The blog, “Providing Actionable LiDAR Point Cloud Deliverables and the Inertial Labs RESEPI” by Luke Wilson, is also available as a downloadable PDF.
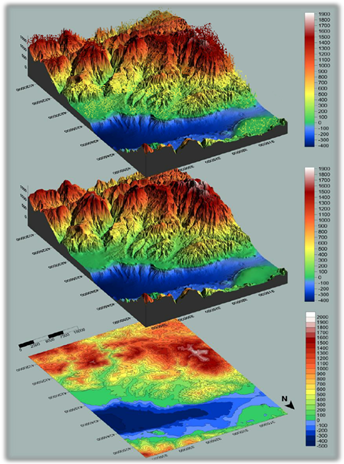
A digital terrain model, a digital surface model, and a digital elevation model (from top). (Image: Inertial Labs)
The blog introduces lidar and creation of point clouds, then discusses the use of GPS-aided inertial navigation systems (INS). “A lidar point cloud is the product of sensor fusion across a GPS-aided INS and a lidar scanner. Each sensor plays a critical role in how a lidar payload functions and the applicability of its point cloud output,” explains Wilson.
Wilson describes complications with converting datum reference frames, both traditional and reference ellipsoid such as WGS84. He also discusses projected coordinate systems. He concludes with analysis of the data using point classification — the foundation to create models including digital terrain, surface and elevation models (DTM, DSM and DEM respectively).
Finally, Wilson explains how Inertial Labs’ RESEPI is a quick and efficient way to generate models of an environment, including in fields such as construction and utility management.
RESEPI stands for REmote SEnsing Payload Instrument, Inertial Labs’ complete multiplatform, multisensor lidar and RGB payload solution for such remote sensing applications.
Read the full blog.